
|
吊臂由六节板式六边形结构的臂段组成,二、三、四、五、六节臂在伸缩机构带动下,可以在基本臂中滑动。
伸缩机构由五个双作用的单级油缸及其支撑组成。
伸缩油缸上装有平衡阀,它保证伸缩臂平稳地伸缩以及当软管万一发生意外破裂时防止吊臂因外力回缩而发生事故。
变幅机构由变幅油缸推动,用来调整吊臂仰角,与吊臂伸缩机构配合,改变工作幅度。
变幅油缸上装有平衡阀,以保证变幅运动的平稳,控制变幅运动的速度,防止万一液压软管意外破裂时发生意外事故。
第一变幅机构由第一变幅油缸带动,用来调整内臂的角度,第二变幅机构邮第二变幅油缸带动,用来调整外臂相对于内臂的角度。
回转支撑的内圈,外圈和中间夹的一圈耐磨钢球组成,内圈固定在固定支腿上,外圈与起重机的转台固定,外圈由回转机构推动旋转。
回转机构由液压马达和回转减速机组成,可以推动转台连续回转。
操纵机构主要由上、下车操纵阀及安装在车架两侧的操纵手柄组成,在手柄的安装支架上有各液压执行机构的动作及其动作方向的指示标牌,操作者应根据相应位置的标牌的指示进行操作。
支腿部分包括前固定支腿箱和前活动支腿以及后固定箱和后活动支腿,活动支腿由水平支腿,垂直支腿油缸和垂直支腿翻转机构组成,在起运车行驶时,垂直支腿180度翻转且活动支腿收缩在固定支腿箱中,在起重作业时,现将支腿上的旋转阀手柄板到水平支腿图标处,然后扳动下车阀操纵手柄将活动支腿伸出,然后再把旋转阀手柄扳到垂直支腿图标处,再次扳动下车阀操纵手柄将垂直支腿翻转180度,然后再扳动垂直支腿操纵手柄,分别调整左右垂直支腿油缸的伸出量,使支腿水平。
取力装置主要由取力器,连接轴,齿轮泵等组成,发动机的动力经离合器,变速箱传给取力器,取力器通过连接轴将动力传给油泵,油泵输出液压油驱动各液压执行机构。
取力器的啮合与分离通过在驾驶室内司机座椅左下方的手动气阀来控制,当需要起重作业时,先启动发动机,将离合器踏板啋下,然后转动手动气阀至取力位置,再将离合器踏板慢慢松开,这时取力器处于啮合状态,油泵工作,起重作业结束后,踩下离合器踏板,转动手动气阀至分离位置,即使油泵脱离取力状态,取力器工作气压为0.5-0.6Mpa,取力装置只允许起重作业时使用,行驶时必须脱开。
注意:取力后发动机转速不得超过1000rpm!
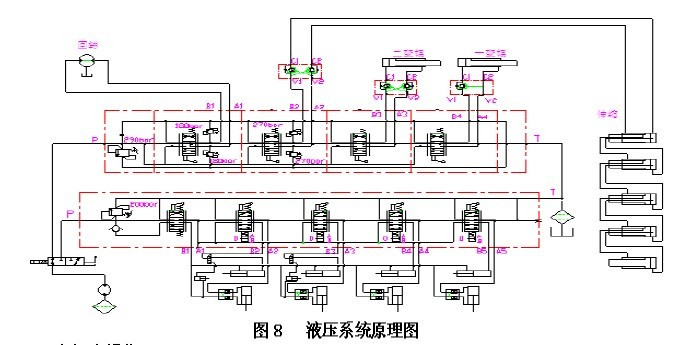
起运车工作部分的动作,包括变幅,仲缩,回转及支腿升降几个机构的动作由组合操纵阀来控制,液压系统工作原理见图8
 |
| 与本页内容相关的产品 |










 鄂公网安备 42130202001307号
鄂公网安备 42130202001307号